D-Lab Design | Assisted Açai Harvesting in Colombia
In this project overseen by MIT’s D-Lab, and in partnership with the Corpocampo organization, I worked in a team of 4 to brainstorm and develop methods to improve the mechanisms employed by Açai farmers in the Colombian Amazon.
Key Skills : Design thinking, design for development, sustainability, affordability and justice in design, design for manufacture, effective communication and collaboration with community partners, stakeholder analysis, rapid prototyping, workshop tools and fabrication methods
Framing the Problem
We met with our project partners at Corpo Campo as well as some representatives from the group of local farmers to understand the acai harvesting process and to touch base on their main concerns.
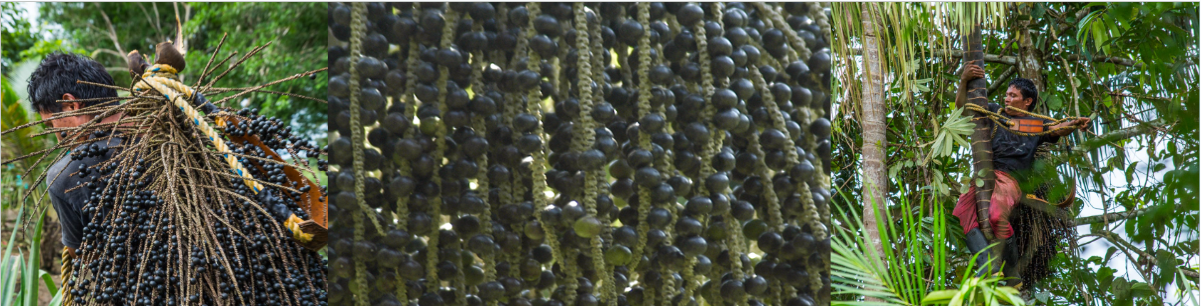
From our stakeholder interview meetings, we gathered that to harvest the fruit, the climbers have to wade or walk 20 minutes to an hour through swampy marsh to get to the Açai palms, at times needing to take boats further down the river to different acai plantations.
At the palms, they work in pairs to climb, harvest and receive branches of Açai berries. The climbers scale 15-20m up thin palm trunks, checking the berries for ripeness before cutting off a suitable branch that could weigh between 10-25kg, or up to about 55 pounds.
 At the moment, the climbers simply physically climb up the trunk in an upward inching motion, supported only by their arms and a loop of cloth tied around their feet which encircle the palm. The climbing motion, the thin trunk, and occasionial windy conditions cause the climbers to sway up to 1m side to side at the top of the palms with the fruit. The climbers would then repeat this process multiple times on different palms until they collect a good day's harvest, estimated at around 250kg or 550pounds.
At the moment, the climbers simply physically climb up the trunk in an upward inching motion, supported only by their arms and a loop of cloth tied around their feet which encircle the palm. The climbing motion, the thin trunk, and occasionial windy conditions cause the climbers to sway up to 1m side to side at the top of the palms with the fruit. The climbers would then repeat this process multiple times on different palms until they collect a good day's harvest, estimated at around 250kg or 550pounds.
What immediately stood out was the safety risks and laborious nature of the harvesting process. The quantity harvested and efficiency of the process also varied greatly depending on the experience level and physical characteristics of the climbers. Despite the dangers involved, however, the current methods were favored for being cheap(one only needed a loop of cloth), lightweight, relatively fast(2min/climb for experienced climber) and straightforward. Any solution we posed would need to:
- greatly increase the safety factor
- be easy to use/easy to train use
- be light enough to transport to the palms
- be cost effective, using locally available materials and manufacturing processes
- be quick to set up and harvest
Background Research and Ideation
 We explored potential harvesting and tree-scaling mechanisms and solutions employed by other farmers and general Arborialists. These ranged from motorized or manual mechanized climbers, to harnesses, specialized hooked shoes or detachable seats. These options were all ruled unfit for the target group by way of cost, weight, or time added for setup.
We explored potential harvesting and tree-scaling mechanisms and solutions employed by other farmers and general Arborialists. These ranged from motorized or manual mechanized climbers, to harnesses, specialized hooked shoes or detachable seats. These options were all ruled unfit for the target group by way of cost, weight, or time added for setup.
By presenting our findings and ideas at regular design reviews and check-in meetings with the project shareholders(Corpocampo representatives and local farmers), as well as our D-Lab Project mentors, we were able to gather feedback to narrow our focus for the prototype.
Project description
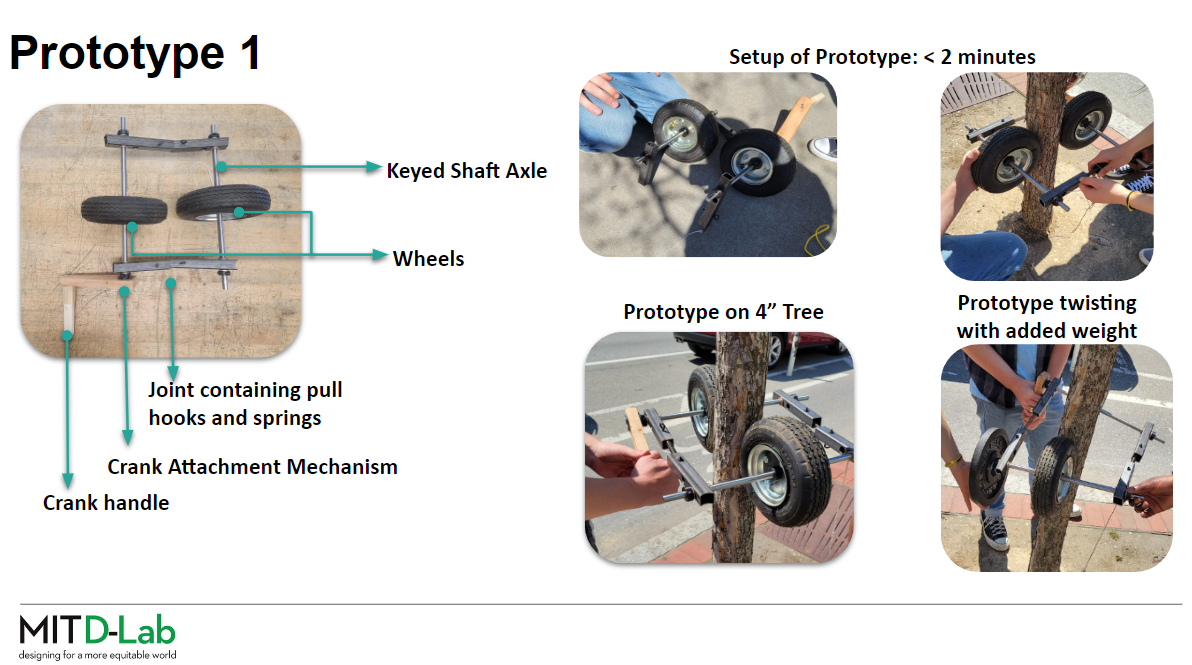
With these findings, design constraints, and feedback in mind, we set out to develop a prototype for a ground-operated climbing mechanism to improve safety and efficiency of harvesting Açai berries for farmers in Colombia.
Iterative Design and Prototyping
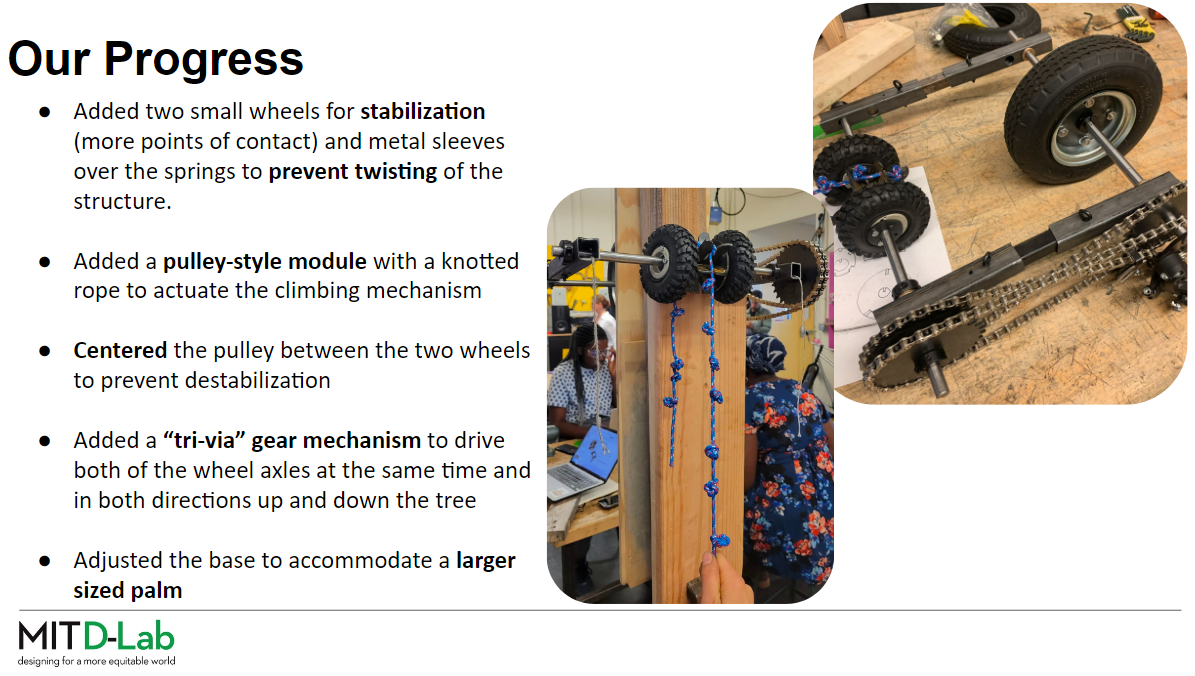
We tested different prototypes, evaluating each against the project's unique constraints. We encountered different challenges surrounding the winching mechanism, stability of the prototype as it climbed the tree, time taken to set up the mechanism, and weight of the materials used.
We brainstormed different fixes, while also drawing inspiration from existing mechanisms, and seeing how to incorporate the new ideas
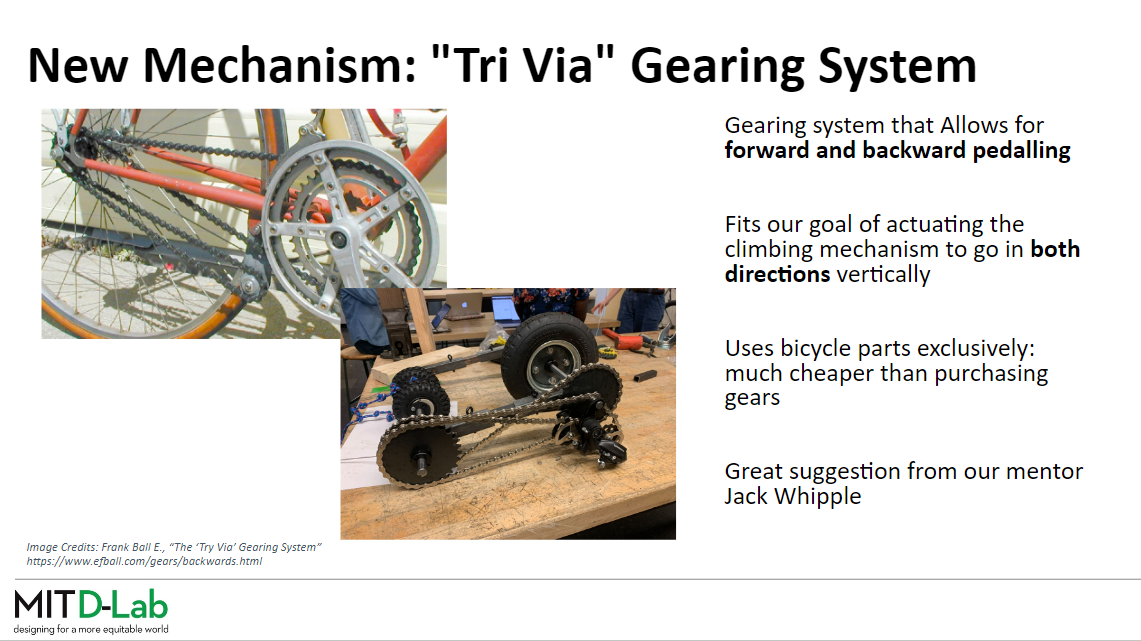
We went on to develop a final prototype with a knotted rope and pulley mechanism, to be iterated upon further by successive project participants to fine tune the climbing mechanism, and test out a cleaving mechanism at different points of attachment to the tree-climber.